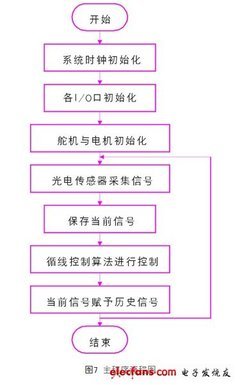
找一个51单片机控制舵机的机器人程序。其他单片机也行!更好的改变…如何用51单片机控制舵机?单片机编程控制舵机求助,没有舵机的信息不知道去哪里改,…一个单片机可以控制多少个舵机?STC89C52如何控制舵机?1.舵机控制信号一般是50HZ的PWM波,占空比在10%之间,51你可以编写自己的程序,用定时器来控制占空比。
1、…c5a60s2单片机想用它控制舵机,请问该如何连接舵机?同求程序。
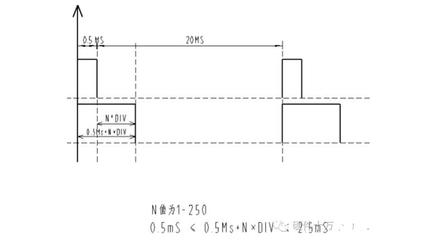
舵机由周期为20ms的脉冲控制,其中0.5ms2ms高电位控制0.180°转向角。我想发射一个脉冲方波,高电位0.5ms,低电位19.5ms,我的想法是P2.1引脚的置位延迟0.5ms,P2.1引脚的置位延迟19.5 ms,以此类推。这样可以吗?我编的程序如下,用示波器检查总是出错。蓝牙。
2、51单片机控制舵机(MG995
当然,只要用一个定时器在任何输入/输出端口产生PWM就行了。需要PWM波来控制舵机,当然430输出PWM波比较方便。转向机通过占空比控制其旋转角度。单片机输出控制信号后,不能直接接舵机,因为功率不够,一个间接非门就够了。控制信号的编程应该很简单,就是总周期固定,不同角度高电平持续时间不同。那么比如50的高水平,150的低水平,需要多少个这样的周期呢?这也是一个问题。太少,旋转时间不够,太多,连续角度变化会不流畅。
3、…单片机能控制几个舵机?用什么样的程序控制?
用单片机控制12个舵机非常简单,而且可以同时分时。编程方法有很多种。我之前写的程序找不到了,要不然可以发给你一个。如果想简单控制,可以通过软件周期延时,不需要定时器中断。分别给12个相同的脉冲!这个要用定时器,否则达不到同样的效果。20ms是舵机周期,一个周期可以同时控制8个舵机,20/2.58。用一个定时器产生脉冲,两个定时器T0,T1,8*2可以同时控制16个舵机。下面是用按键控制一个舵机的转动。可以参考下面的程序,设置更多的io口,在switch函数的条件语句中加入每个io口的脉冲宽度,比如case0。
4、求一个51单片机控制舵机机器人的程序。其他单片机的也行!最好改改…
5、如何用51单片机控制舵机的?怎样编写程序啊?大哥帮帮忙
舵机是一种位置伺服驱动器,适用于那些需要保持角度不断变化的控制系统。其工作原理是控制信号从接收机的通道进入信号调制芯片,获得DC偏置电压。其中有一个参考电路,产生一个周期为20ms,宽度为1.5ms的参考信号,将得到的DC偏置电压与电位器的电压进行比较,得到一个电压差输出。最后将正负电压差输出到电机驱动芯片,确定电机的正反转。
6、单片机STC89C52如何控制舵机
1。舵机控制信号一般是50HZ的PWM波,占空比在10%之间。51你可以自己写程序,用定时器来控制占空比。2.如果是步进电机,我知道在它们(电机和单片机)之间加一个ULN2003控制芯片就够了。3.舵机的控制信号是一个周期为20ms的信号,高电平时间为1ms到2ms,所以可以通过任意一个I/O口输出中间信号来控制舵机。
7、单片机编程控制舵机求救啊啊
没有舵机的信息不知道换哪里。请先尝试更改小延迟参数。尝试使num变小或变大。如果不行,就改成角度(75,75,75,75,100);里面的参数应该比较大或者效果被低估了。你告诉别人你的需求并不难。你的代码我粗略看了一下,看了个没完没了。我觉得你的思维是可以改进的。你的change函数有一个地方不完善:while(!(num 100));/*延迟时间*/这种方式很浪费MCU资源,不应该在这里瞎等。
比如少量代码。四向转向器的PWM高电平时间和低电平时间存储在变量中。如struct PWM time { unsignedintPWM _ T _ T;//PWM脉冲长度unsignedintPWM _ L;//PWM低电平时间unsignedcharNow _ Angle//记录当前角度unsignedcharNext _ Angle//角度转到unsignedcharPWM _ Num//要发送的PWM脉冲数。
8、51单片机控制舵机转角的C语言程序
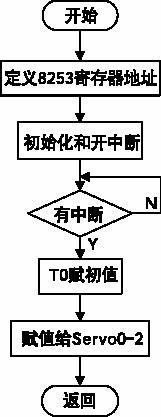
舵机频率50hz是指一个周期为20ms,占空比为2.5%到12.5%时,占空比可以从90度变化到90度。微控制器中有一个工作晶振频率,定时器就是基于这个频率,根据程序可以知道20ms计2万,那么定时器加1的时间就是1us。这个程序意味着首先运行定时器0,20ms后,输出设置为1,定时器1开启。定时器1计数到1.5ms后,触发中断使输出为0,即占空比为1.5/20%,当中间位置定时器的寄存器加0时,中断将被触发,因此所有寄存器都被写入负数。如果要20ms,写20000,那么需要增加到0的计数个数是20000,第一次计数是1us,所以是20 ms,寄存器由两个八位寄存器组成,建议20000单独写,有时间可以看看郭天祥先生的51单片机视频,不多。好像第三集是讲定时器的。